Revenons un instant sur le concept d’énergie. L’énergie
\(E\) est la capacité d’un système
à faire du travail \(W\). Dans un
espace unidimensionnel:
\[dW=Fdx\label{eq:def_travail}\]
L’énergie donnée par un système à l’environnement est perdue.
Par convention, on lui donne un signe négatif. Ainsi, le travail
fait par un système sur l’environnement revient à une perte
d’énergie par le système, mais à un gain d’énergie par
l’environnement.
\[\Delta
E=-W\label{eq:def_energie}\]
Cette capacité peut donc être soit dépensée, soit conservée.
Dans le cadre de ce document, nous allons définir les différents
types d’énergie dans différentes situations, et étudier différentes
stratégies pour en déduire les fonctions décrivant l’évolution d’un
système au cours du temps.
Énergie
dépensée : force non-conservatrice
Une force non-conservatrice est une force qui ne conserve pas
l’énergie mais la converti en une autre forme. Par exemple, lors de
la friction entre deux objets, une partie de leur énergie cinétique
est convertie en chaleur, l’énergie du mouvement des molécules.
Prenons un objet se mouvant à vitesse constante \(v\). A un temps \(t=0\), cet objet subit une force de friction
dynamique \(F_{D}\) telle que:
On peut s’attendre à ce que la vitesse de l’objet change, nous
sommes donc dans une situation dynamique: c’est la seconde loi de
Newton qui s’applique. On écrit donc:
\[-\mu mg=m\frac{dv}{dt}\]
On en déduit l’équation de vitesse de l’objet. Résolvons pour
\(dv\):
\[dv=-\mu gdt\]
On prend l’intégrale des deux côtés:
\[\int_{v_{0}}^{v}dv=-\mu
g\int_{0}^{t}dt\]
\[v-v_{0}=-\mu gt\]
On obtient une expression pour la vitesse en fonction du
temps:
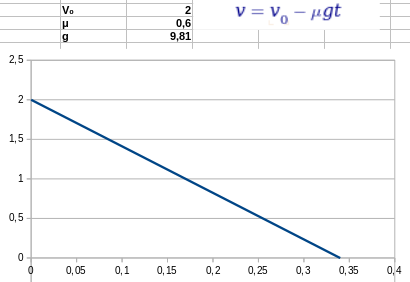
\[v(t)=v_{0}-\mu gt\]
Évolution de la vitesse en fonction du temps sous
friction
On note que la vitesse décroît linéairement. Cette décroissance
dépend du coefficient de friction et de la gravité.
Le travail fait par la force de friction se calcule en prenant
l’intégrale de la force sur une distance \(\Delta x=x-x_{0}\):
\[W=\int_{x_{0}}^{x}-\mu
gdx\]
\[W=-\mu g(x-x_{0})\]
Du point de vue du système, ce travail est négatif. Le système
perd donc de l’énergie, ici sous forme de chaleur. Vu de
l’extérieur, l’énergie est positive - elle est donnée par le
système à l’environnement.
Énergie
conservée: force conservatrice
Une force conservatrice est une force qui ne génère pas de
pertes - qui conserve l’énergie dans un même type : mécanique,
électromagnétique, etc.
Prenons par exemple un ressort. En le compressant, on lui donne
de l’énergie qu’il conserve jusqu’à ce qu’on le relâche. Selon la
loi de Hooke:
\[F_{k}=-kx\label{eq:loi_hooke}\]
Reprenons le même exemple de l’objet qui se meut à vitesse
constante \(v_{0}\). A un moment
\(t=0\) et une position
\(x_{0}=0\), l’objet rencontre un
ressort. Nous sommes encore dans une situation dynamique:
\[-kx=m\frac{dv}{dt}\]
On réorganise:
\[\frac{d{{}^2}x}{dt{{}^2}}+\frac{k}{m}x=0\]
Nous sommes en présence d’une équation différentielle du second
ordre. Nous écrivons donc l’équation caractéristique:
\[r{{}^2}+\frac{k}{m}=0\]
\[r=\pm
j\sqrt{\frac{k}{m}}\]
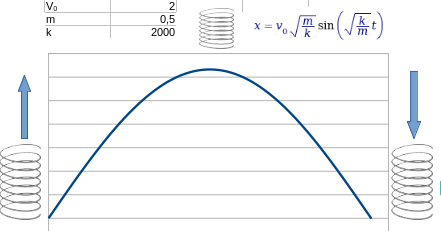
La racine est imaginaire. Nous trouvons sa primitive et nous
écrivons la solution de l’équation différentielle.
Étudions maintenant le travail fait par le ressort sur l’objet.
La vitesse angulaire est \(\omega=\sqrt{\frac{k}{m}}\), donc la période
est \(T=2\pi\sqrt{\frac{m}{k}}\).
Au bout d’un quart de période (\(T=\frac{\pi}{2}\sqrt{\frac{m}{k}}\)), le
ressort est compressé.
Le travail fait par le ressort lors de la compression est:
On reconnaît ici l’énergie cinétique d’un corps en mouvement :
le ressort conserve toute l’énergie cinétique de la masse au bout
d’un quart de période.
Maintenant, si on calcule le travail fait par le ressort au bout
d’une demie période:
On en déduit qu’après un retour à \(x_{0}\), il n’y a plus d’énergie dans le
ressort : l’énergie a été entièrement restituée à l’objet.
On en conclut qu’en l’absence de frottements, l’énergie
mécanique totale est conservée, c’est à dire restituée par le
système, sans pertes.
Forces conservatrices et non-conservatrices
Étudions maintenant une situation dans laquelle les deux types
de forces sont présentes. Par exemple, un ressort auquel une masse
est attachée, puis tirée et relâchée. On observe qu’elle oscille,
c’est à dire qu’elle monte et descend à une période donnée.
La situation est dynamique, donc c’est la seconde loi de Newton
qui s’applique. Ici, les forces en présence sont la force de rappel
(loi de Hooke [eq:loi_hooke]) et une forme
d’amortissement dépendant de la vitesse : le frottement visqueux
\(\gamma\).
Prenons à nouveau \(x(0)=x_{0}\) comme condition initiale:
\[x_{0}=A+B\]
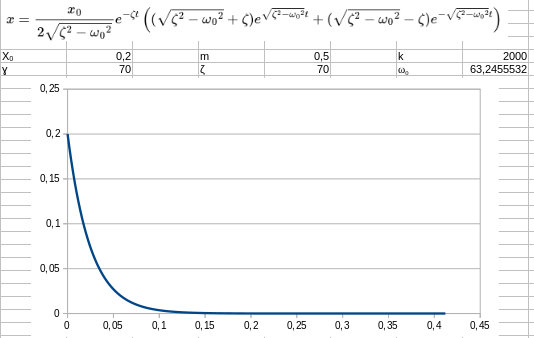
Nous avons besoin d’une seconde condition initiale. Nous savons
que la vitesse initiale, au moment où on relâche la masse, est
nulle - \(v(0)=0\). La dérivée de
notre solution, évaluée à zéro, est égale à zéro. Le système
d’équations obtenu est simple mais fastidieux à résoudre:
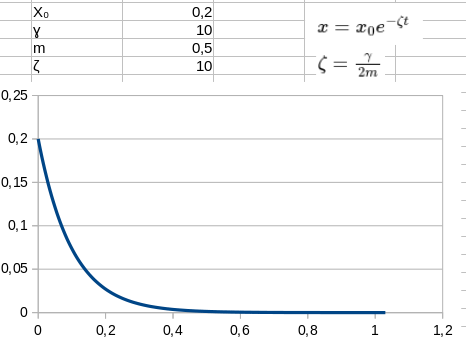
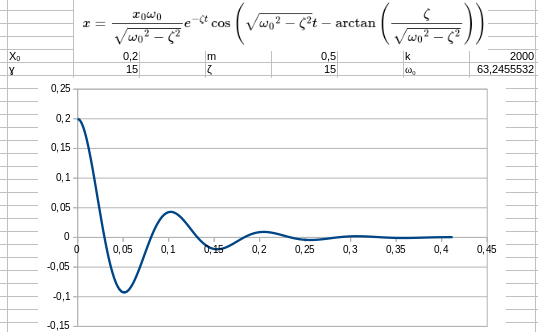
C’est une fonction produit d’une exponentielle avec une
sinusoïde : l’oscillateur oscille et son amplitude décroît
exponentiellement avec le temps.
Circuit RL en régime alternatif
Étudions maintenant une autre forme d’énergie : l’énergie
électrique. Dans un circuit, une résistance dissipe l’énergie
électrique sous forme de chaleur. C’est l’effet Joule :
\[P_{J}=I{{}^2}R\]
La résistance est donc analogue au frottement en mécanique.
La tension est une augmentation ou une chute du potentiel
électrique dans un circuit. Selon la loi d’Ohm:
\[U_{R}=IR\]
Un inducteur est une bobine, et une bobine parcourue par un
courant électrique alternatif produit une tension:
\[U_{L}=L\frac{dI}{dt}\]
Comme l’énergie électrique est stockée et restituée par
l’inducteur, il est analogue à un ressort en mécanique.
On définit maintenant l’impédance \(Z\), la tendance qu’a un composant
électrique à opposer le va-et-vient des électrons, et donc du
courant alternatif. On comprend, vu le contexte de ce document, que
les types d’impédances sont liées à leur rapport à l’énergie : si
elles dissipent l’énergie ou si elles la conservent. Quoiqu’il en
soit, la loi d’Ohm s’écrit en termes d’impédance:
\[U=ZI\]
L’impédance est une quantité complexe - ce n’est pas un jugement
de valeur, c’est un qualificatif.
Une quantité complexe possède une partie réelle et une partie
imaginaire. En analyse de circuit, la partie réelle correspond à
l’impédance résistive \(R\), due
aux résistances; la partie imaginaire correspond à la réactance
\(X\) - l’impédance d’un composant
qui stocke et restitue l’énergie.
Définissons une intensité:
\[I=I_{0}\cos(\omega t)\]
C’est la partie réelle \(\mathcal{\Re}\)d’un nombre complexe:
\[I=\mathcal{\Re}(I_{0}e^{j\omega
t})\]
En appliquant cette définition à la tension sur un inducteur, on
en dégage sa réactance:
\[U_{L}=L\frac{d(I_{0}e^{j\omega
t})}{dt}\]
\[U_{L}=j\omega LI_{0}e^{j\omega
t}\]
On en déduit, grâce à la loi d’Ohm, la réactance d’un inducteur
:
\[X_{L}=j\omega L\]
La représentation d’un nombre complexe par un vecteur tournant
permet de visualiser et manipuler les nombres complexes. Prenons le
temps de nous y attarder.
On peut représenter une fonction sinusoïdale par un vecteur de
Fresnel - un vecteur tournant dont une dimension est réelle,
l’autre imaginaire. Par exemple, une tension alternative...
\[U=U_{0}\cos(\omega t)\]
... devient, sous forme complexe:
\[\underline{U}=U_{0}e^{j\omega
t}\]
Lorsqu’on représente un nombre complexe par un vecteur de
Fresnel, on peut déduire deux quantités. Pour un nombre complexe
\(z=a+ib\):
le module (norme du vecteur)
\[|z|=\sqrt{a{{}^2}+b{{}^2}}\label{Module}\]
l’argument (angle du vecteur par rapport à l’axe réel)
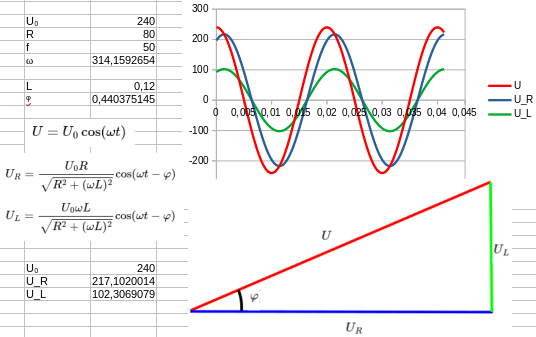
Pour obtenir les expressions pour la tension sur la résistance
ou l’inducteur, on n’a qu’à appliquer la loi d’Ohm à l’intensité
qu’on vient de trouver:
Ceux d’entre nous qui ont déjà étudié les circuits électriques
alternatifs retrouveront ici la représentation de Fresnel des
tensions dans un circuit présentant une inductance.
Énergie dans un inducteur, un condensateur
Nous avons compris que l’énergie peut être stockée dans un
ressort ou dans un champ gravitique. Prenons un instant pour
déterminer l’énergie qu’il est possible de stocker dans un
inducteur ou un condensateur.
Dans un condensateur, l’énergie électrique est stockée dans un
champ électrique. On peut trouver l’énergie stockée à partir de la
définition de la puissance.
\[P=UI\]
\[\frac{dW}{dt}=\frac{q}{C}\frac{dq}{dt}\]
\[dW=\frac{q}{C}dq\]
\[W=\frac{q{{}^2}}{2C}\]
Pour un condensateur complètement chargé, comme \(U_{0}=\frac{Q_{0}}{C}\):
\[W_{C}=\frac{C}{2}U_{0}{{}^2}\]
Dans un inducteur, l’énergie est stockée dans un champ
magnétique. Suivant le même raisonnement:
\[\frac{dW}{dt}=L\frac{dI}{dt}I\]
\[dW=LIdI\]
\[W_{L}=\frac{L}{2}I{{}^2}\]
On constate alors que l’énergie stockée par un condensateur
dépend de la tension sur lui, et l’énergie stockée dans un
inducteur dépend de l’intensité qui le traverse.
Oscillateur
forcé - régime permanent
Maintenant qu’on a utilisé les nombres complexes pour décrire un
circuit électrique, revenons à l’oscillateur mécanique pour le cas
où une force périodique lui est appliqué.
Admettons un instant que le régime de cet oscillateur, sans
force appliquée, soit pseudo-périodique[eq:pseudo_periodique]. Nous
recherchons donc une solution complexe de la forme :
\[x(t)=\underline{X}e^{j\omega
t}\]
En effet, nous nous attendons à ce que la réponse soit une
oscillation. Insérons maintenant cette solution dans l’équation
différentielle:
C’est le régime permanent, sur la durée, d’un oscillateur soumis
à une force harmonique.
Avec la méthode des nombres complexes, la solution a été
relativement simple à trouver. Ce n’est cependant pas la solution
complète : le régime permanent ne décrit pas le comportement de
l’oscillateur au tout début, particulièrement s’il est initialement
compressé.
Oscillateur
forcé
Ce que nous avons trouvé dans la section précédente est le
régime permanent de l’oscillateur. Cela ne décrit pas le régime
transitoire, lorsque la fréquence d’oscillation de l’oscillateur
amorti est encore présente. Pour obtenir une expression qui décrive
le régime complet, il va peut être falloir revenir à des méthodes
de résolution plus classiques et complètes.
C’est le régime transitoire de l’oscillateur forcé - la partie
qui nous manque. Nous recherchons maintenant la solution
particulière de l’équation différentielle non-homogène:
La stratégie pour trouver la solution particulière est nommée
“educated guess”, ou “essai intelligent”. On propose que la
solution particulière soit de la forme suivante:
\[x=C\cos(\omega t)+D\sin(\omega
t)\]
Prenons un moment pour expliquer ce point - et justifier
pourquoi on appelle cette stratégie un essai intelligent.
Lorsque nous avons utilisé la méthode des nombres complexes,
nous avons obtenu une solution qui décrit le régime permanent de
l’oscillateur. Il nous manquait la partie transitoire.
En reprenant la solution de l’équation non-homogène, on reprend
en compte cette partie transitoire : une oscillation qui décroît et
s’éteint avec le temps.
Il suffirait donc d’ajouter à cette solution la solution
particulière. Et quelle forme aurait cette solution particulière?
La même que le régime permanent.
La forme du régime permanent est:
\[x=\alpha\cos(\omega
t+\beta)\]
Qui peut se réécrire :
\[x=C\cos(\omega t)+D\sin(\omega
t)\]
En insérant cette solution dans l’équation non-homogène, on
devrait retrouver le régime permanent de notre oscillateur.
Procédons:
Il me semble qu’une identité trigonométrique qu’on a déjà
utilisé serait utile ici. Ce qu’on souhaite, c’est passer de la
forme suivante de la partie permanente...
Ce qui est intéressant ici, c’est que la partie permanente de
cette expression est exactement ce que nous avions trouvé en
utilisant les nombres complexes - ce qui était, il faut bien
l’admettre, beaucoup plus simple. On en déduit une méthode de
résolution pour ce type d’équation différentielle : trouver la
solution de l’équation homogène en utilisant les stratégies
classiques - c’est le régime transitoire; puis trouver la solution
particulière en utilisant la méthode des nombres complexes - c’est
le régime permanent.
De plus, on peut traiter les deux parties séparément quand on en
vient à imposer les conditions initiales. Admettons que
l’oscillateur soit compressé à \(t=0\):
\[x_{0}=A\]
Comme d’habitude, la seconde condition initiale est \(v(0)=0\).
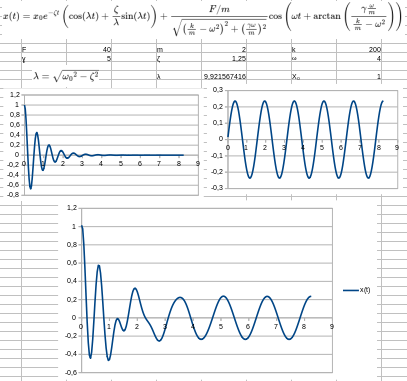
On voit que le ressort, compressé à \(t=0\) à \(x_{0},\)décroît rapidement à cause de
l’amortissement, et que la force, d’une vitesse angulaire
différente, prend le dessus. Les conditions initiales (ressort
compressé) sont indépendantes de la force harmonique appliquée. Si,
en revanche, les conditions initiales étaient celles de
l’oscillateur au repos (non compressé), alors seule la partie
permanente serait présente.
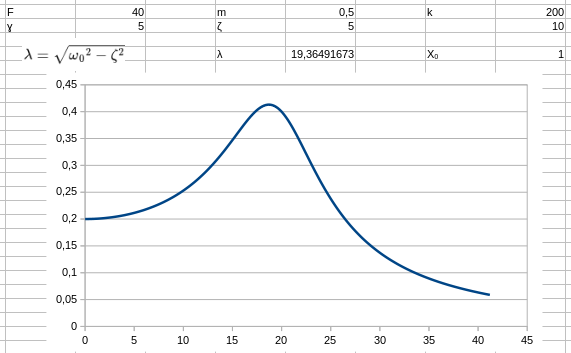
Résonance
En cas d’absence d’amortissement, la fonction devient:
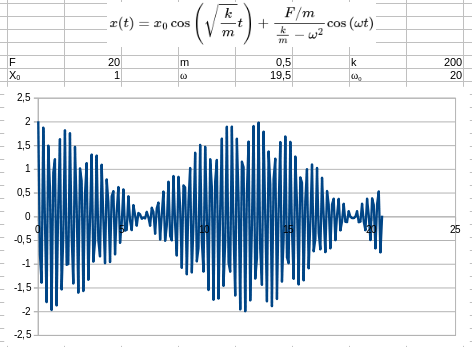
On note que l’amplitude atteint un maximum lorsque la fréquence
de la force \(\omega\) est proche
de la fréquence naturelle de l’oscillateur \(\lambda\). On peut donc s’attendre à une
augmentation de l’amplitude des oscillations, comme on l’a noté
avec l’oscillateur forcé non-amorti.
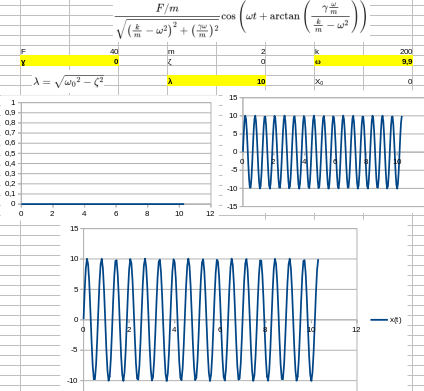
En fait, enlevant toute oscillation initiale et ne gardant que
la force, puis approchant sa vitesse angulaire de celle de
l’oscillateur :
Oscillateur forcé en résonance
L’amplitude augmente dramatiquement.
La résonance est donc le phénomène par lequel en approchant la
fréquence naturelle de l’oscillateur \(\lambda\), on obtient des oscillations de
plus en plus fortes. Jusqu’à, possiblement, la rupture.
Circuit RLC en série - charge
Un circuit RLC en continu est un circuit composé d’une source
continue, d’une résistance, d’un inducteur et d’un condensateur.
Prenons le temps de lister les tensions pour chacun des
composants:
Pour une résistance, la tension est donnée simplement par la loi
d’Ohm:
\[U_{R}=RI\]
Pour un inducteur, elle dépend de l’inductance et de l’évolution
du courant;
\[U_{L}=L\frac{dI}{dt}\]
Pour un condensateur, elle dépend de sa capacitance et de la
charge qu’il contient:
\[U_{C}=\frac{q}{C}\]
Appliquant la loi des mailles à ce circuit, on obtient une
équation différentielle:
\[Lq''+Rq'+\frac{1}{C}q=U\]
Notons que j’utilisé, pour écrire cette équation, la définition
de l’intensité électrique:
\[I=\frac{dq}{dt}\]
Résolvons la forme homogène en prenant son équation
caractéristique:
On a déjà vu cela quelque part: l’oscillateur avec
amortissement. Et mathématiquement, c’est exactement la même chose.
L’énergie était tantôt stockée dans le ressort, tantôt dans la
gravité; ici, elle est tantôt stockée dans l’inducteur, tantôt dans
le condensateur. Tout est pareil, si ce n’est pour la forme de
l’énergie considérée.
Admettons tout de suite que \(\omega_{0}>\zeta\) - on réservera les
autres cas pour une autre occasion.
L’équation non-homogène est égale une constante \(U\). Cela signifie que, pour la solution
particulière - le régime permanent, après un certain temps - la
charge ne varie plus. Les dérivées \(q''(t)\) et \(q'(t)\) sont alors égales à zéro.
Nos conditions initiales sont que \(q(0)=0\) et \(q'(0)=0\) : le circuit n’est parcouru par
aucun courant à \(t=0\) et il n’y
a pas de charge sur le condensateur.
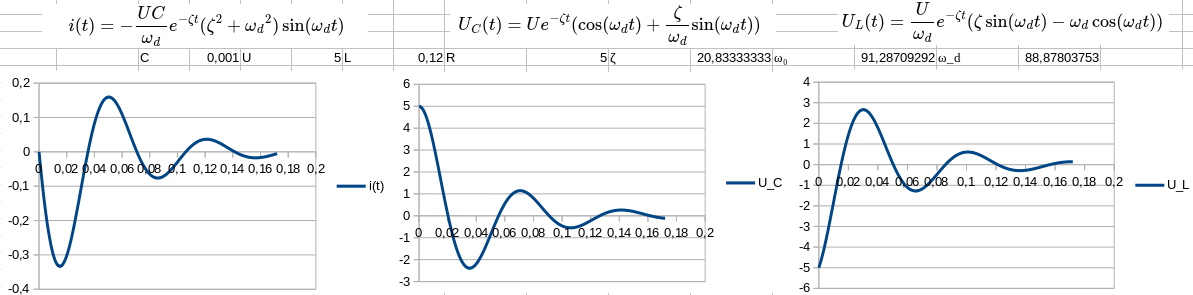
On prend donc la dérivée - et trouve en même temps l’expression
pour l’intensité:
Reste à déterminer les tensions sur le condensateur et sur
l’inducteur. Nous avions vu que \(U_{C}=\frac{q}{C}\). Ce qui signifie que
nous devons récupérer l’expression pour la charge...
Lorsque la source est connectée, le courant augmente rapidement,
donc la tension sur l’inducteur commence d’un maximum. Au fur et à
mesure que le condensateur se charge, le courant diminue, ainsi que
la tension sur le condensateur. Le système oscille un moment entre
positif et négatif, et la tension sur le condensateur dépasse un
maximum avant de revenir à sa tension de charge.
Dans l’état, le condensateur est chargé, et il le restera tant
qu’on ne le connecte pas à une nouvelle résistance.
Circuit
RLC série - décharge
Comme on l’a vu dans la section précédente, un circuit RLC en
charge se comporte comme un ressort recevant une masse : de
l’énergie est transférée de l’inducteur au condensateur. Si on
ouvre le circuit après la charge, le condensateur conserve cette
énergie.
Supposons maintenant que nous connections le circuit à une
nouvelle résistance. Nous sommes maintenant en présence d’un
circuit RLC sans source. La solution de l’équation différentielle
homogène est la même :
On note qu’en effet, le courant est initialement négatif. La
tension étant maximale sur le condensateur au début, elle est
maximale et négative sur l’inducteur. Le système oscille ensuite
entre positif et négatif - s’il n’y avait pas de résistance, il
oscillerait librement.