Les vecteurs sont des quantités mathématiques qui contiennent trois informations:
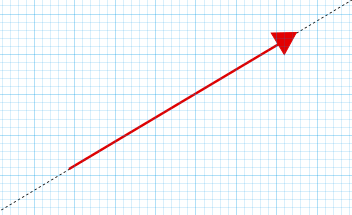
une direction, représentée par une droite passant par deux points
un sens, représenté par une flèche pointant vers l’un des deux points
une norme, équivalente à la longueur du vecteur
Direction, sens et norme d’un vecteur
Pour simplifier, on peut dire qu’un vecteur est une flèche représentant une quantité qui a une direction, par exemple une vitesse, une accélération, une force …
Un vecteur en n-dimensions est défini par n-valeurs. Par exemple, un vecteur en deux dimensions est défini par deux nombres; un vecteur en trois dimensions par trois nombres; etc. Les nombres peuvent être présentés de différentes manières:
entre parenthèses, séparés par un point-virgule: \((a;b)\)
sous forme de matrice, contenant autant de cases qu’il y a de dimensions: \(\left(\begin{array}{cc}
a & b\end{array}\right)\) ou \(\left(\begin{array}{c}
a\\
b
\end{array}\right)\)
On représente un vecteur par son nom surmonté d’une flèche: \(\vec{v}\).
Propriétés
Un vecteur est défini par ses dimensions, chaque valeur correspondant à une dimension de l’espace. En trois dimensions:
\[\vec{v}=(v_{x}\ v_{y}\ v_{z})\]
La norme d’un vecteur étant sa longueur, elle peut être calculée en utilisant le théorème de Pythagore sur autant de dimensions que le vecteur en a :
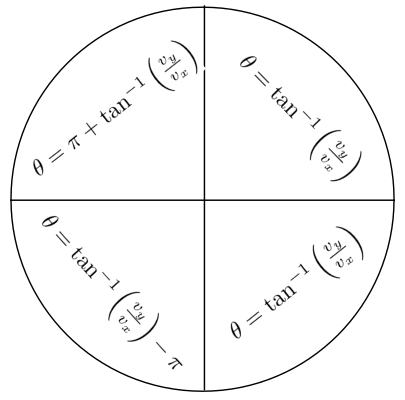
La direction d’un vecteur, elle, se trouve par trigonométrie, mais en prenant en compte les quadrants (signe de \(v_{x}\) et de \(v_{y}\)). En deux dimensions:
si \(v_{x}>0\) : \(\theta=\tan^{-1}\left(\frac{v_{y}}{v_{x}}\right)\)
si \(v_{x}=0\) et \(v_{y}>0\): \(\theta=\frac{\pi}{2}\)
si \(v_{x}<0\) et \(v_{y}>0\): \(\theta=\pi+\tan^{-1}\left(\frac{v_{y}}{v_{x}}\right)\)
si \(v_{x}<0\) et \(v_{y}<0\): \(\theta=\tan^{-1}\left(\frac{v_{y}}{v_{x}}\right)-\pi\)
si \(v_{x}=0\) et \(v_{y}<0\): \(\theta=-\frac{\pi}{2}\)
Angle d’un vecteur
Un vecteur unitaire\(\hat{v}\) est un vecteur dont la taille est égale à 1. Pour obtenir les coordonnées d’un vecteur unitaire, on divise les coordonnées d’un vecteur par sa norme.
\[\hat{v}=\frac{\vec{v}}{|\vec{v}|}\]
Opérations
Dans un espace orthonormé, c’est à dire dans lequel toutes les dimensions sont perpendiculaires les unes aux autres, les dimensions d’un vecteur représentent un déplacement. Par exemple, dans un espace tridimensionnel \(x\), \(y\) et \(z\), ces déplacements sont respectivement \(\Delta x\), \(\Delta y\) et \(\Delta z\). Ainsi, on peut écrire:
\[\vec{v}=(\Delta x\;\Delta y\;\Delta z)\]
L’addition ou la soustraction de vecteurs consiste à ajouter ou soustraire les quantités dans chaque dimensions. Pour \(\vec{v}=(v_{x}\;v_{y})\) et \(\vec{u}=(u_{x}\;u_{y})\):
Par trigonométrie, on peut démontrer une autre manière de calculer le produit scalaire avec l’angle \(\theta\) entre les deux vecteurs tel que \(\theta=\theta_{v}-\theta_{u}\):
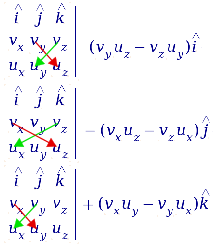
le produit vectoriel est un vecteur dont la norme est le produit des normes des deux autres, et la direction est perpendiculaire aux deux autres.
Le calcul est similaire au calcul du déterminant d’une matrice de n-dimensions dont la première ligne contient les vecteurs unitaires de chaque dimension : \(\hat{i}\), \(\hat{j}\) et \(\hat{k}\):
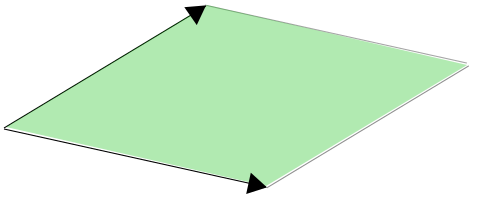
Le produit vectoriel donne donc les coordonnées d’un vecteur qui est perpendiculaire aux deux autres, et dont la norme est égale à l’aire entre les deux vecteurs. Ainsi, l’aire entre deux vecteurs en deux dimensions est simplement:
\[S=v_{x}u_{y}-v_{y}u_{x}\]
Aire entre deux vecteurs
Représentation de Fresnel
Un signal périodique est une quantité qui oscille entre deux extrema, une amplitude positive et une amplitude négative. Il est décrit par la fonction périodique telle que:
\[y(t)=y_{0}\sin(\omega t+\phi)\]
L’amplitude est donnée par \(y_{0}\), la vitesse angulaire par \(\omega\) et le déphasage par \(\phi\).
Si le déphasage entre deux signaux est positif, le signal est en retard par rapport au signal de référence; s’il est négatif, il est en avance.
La vitesse angulaire est la vitesse à laquelle un angle est parcouru. C’est donc un angle divisé par un temps. Pour un angle de \(2\pi\), le temps est la période \(T\), c’est à dire le temps d’une période complète.
\[\omega=\frac{2\pi}{T}\]
L’inverse de la période est la fréquence \(f\)- le nombre de périodes effectuées par seconde:
\[f=\frac{1}{T}\]
Le déphasage est un angle entre deux signaux de même fréquence.
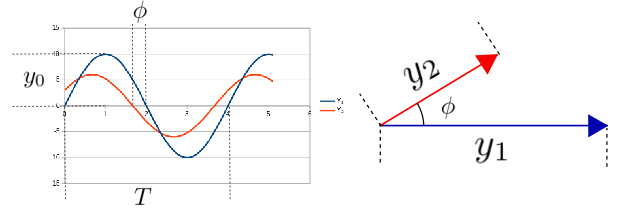
La représentation de Fresnel consiste à représenter plusieurs signaux périodiques de même fréquence par des vecteurs afin de pouvoir effectuer des opérations entre eux. Dans cette représentation, le signal périodique est vu comme un vecteur en rotation, sa norme étant égale à l’amplitude du signal, son angle étant égal au déphasage par rapport à une origine.
Représentation de Fresnel
Pour passer d’une fonction à un vecteur, il suffit de calculer les coordonnées \(\Delta x\) et \(\Delta y\) du vecteur avec l’amplitude et l’angle de déphasage.
\[\vec{y}=(y_{0}\cos(\phi)\ y_{0}\sin(\phi))\]
Pour passer d’une représentation vectorielle à une fonction, il suffit de calculer la norme \(y_{0}\) du vecteur et son angle de déphasage \(\phi\) à partir de ses coordonnées (en prenant en compte son quadrant).