Un moment en Physique n'est pas un temps mais quelque chose de complètement différent : il s'agit d'une force appliquée à une certaine distance d'un axe de rotation. Quantitativement, c'est le produit de la force par la distance.

\vec{M}=\vec{F} r
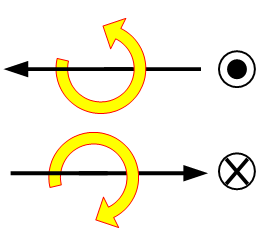 D'abord, quelques détails sur la représentation graphique d'un moment. Si le sens de rotation est antihoraire, alors le moment est positif. S'il est horaire, alors le moment est négatif. Sur un graphique, on représente un moment antihoraire par la pointe d'une flèche vue de devant, et un moment horaire par l'arrière d'une flèche. Quand je dis "flèche", je veux dire une flèche qu'on tire avec un arc...
D'abord, quelques détails sur la représentation graphique d'un moment. Si le sens de rotation est antihoraire, alors le moment est positif. S'il est horaire, alors le moment est négatif. Sur un graphique, on représente un moment antihoraire par la pointe d'une flèche vue de devant, et un moment horaire par l'arrière d'une flèche. Quand je dis "flèche", je veux dire une flèche qu'on tire avec un arc...
On parle d'abord de moment lorsqu'on étudie la loi des leviers. Celle ci dit que la force en bout de levier est proportionnelle à la force à l'autre bout, à la distance entre l'axe et le point d'application de cette force, et inversement proportionnelle à la distance entre l'axe et la force en bout de levier. Mathématiquement :

\vec{F_1} r_1 = \vec{F_2}r_2\\ \vec{F_2}= \frac{r_1}{r_2}\vec{F_1}
 La source de cette loi vient de l'idée de moment. En effet, si on applique une force F1 à une distance r1 de l'axe de rotation, on crée un moment centré sur l'axe de rotation. Du point de vue de l'autre bout du levier, ce moment provoque une force qui est inversement proportionnelle à la distance r2.
La source de cette loi vient de l'idée de moment. En effet, si on applique une force F1 à une distance r1 de l'axe de rotation, on crée un moment centré sur l'axe de rotation. Du point de vue de l'autre bout du levier, ce moment provoque une force qui est inversement proportionnelle à la distance r2.

\vec{M} = \vec{F_1}r_1 \\ \vec{F_2} = \frac{ \vec{M}}{r_2}
Comme il s'agit du même moment, on peut combiner ces deux expressions en une seule. Il serait bon de noter à ce stade que cette loi présume que la poutre utilisée n'a pas de masse.
Un moment n'est jamais qu'un autre type de force. Les lois de Newton s'appliquent donc aux moments comme aux forces. Si la première loi semble bien familière, la deuxième introduit une nouvelle quantité : le moment d'inertie I, qui dépend de la géométrie et de la masse de l'objet en rotation.

\sum{\vec{M}} = 0\\ \sum{\vec{M}} = I\alpha\\
Nous reviendrons sur l'inertie lorsque nous parlerons d'énergie cinétique de rotation. Pour l'heure, concentrons-nous sur l'application de la première loi.
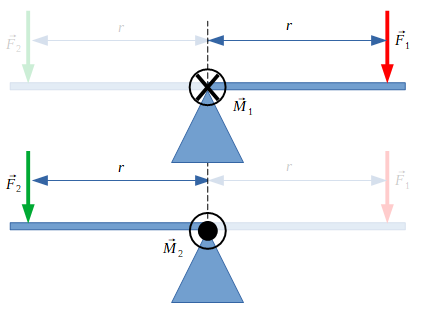 Supposons que nous tentions de mettre un système avec un axe de rotation en équilibre (statique). En d'autres termes, supposons que nous jouions avec une balance.
Supposons que nous tentions de mettre un système avec un axe de rotation en équilibre (statique). En d'autres termes, supposons que nous jouions avec une balance.
Le premier moment M1, dû à F1, est horaire - cela signifie qu'il est négatif. Le second moment M2, dû à F2, est antihoraire - cela signifie qu'il est positif. Si nous appliquons la première loi de Newton pour les moments, on obtient :
\sum{\vec{M}} = 0\\ \vec{M_1} - \vec{M_2}=0\\ \vec{M_1} = \vec{M_2}
Maintenant, reprenons la définition du moment (force fois distance) et celle de la force (masse fois accélération). Si nous prenons la gravité comme accélération :
m_1 \vec{g} r_1 = m_2 \vec{g} r_2\\ m_1 r_1 = m_2 r_2
Cette expression signifie que si on augmente une des masses, on doit diminuer d'autant la distance de l'axe de rotation, et inversement.






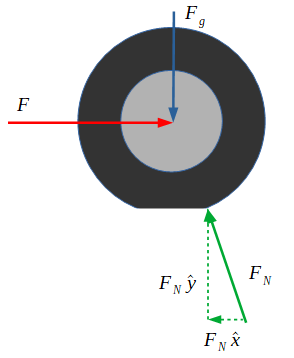
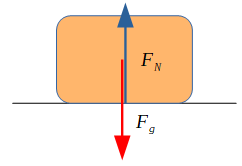 Commençons par poser une masse sur le sol. Tout immobile qu'elle soit, elle ressent, comme toute chose sur Terre, une force : celle de la gravité. On représente la gravité par un vecteur qui part du centre de masse et va vers le centre de la Terre.
Commençons par poser une masse sur le sol. Tout immobile qu'elle soit, elle ressent, comme toute chose sur Terre, une force : celle de la gravité. On représente la gravité par un vecteur qui part du centre de masse et va vers le centre de la Terre.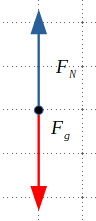 Le diagramme de forces est simplement une transposition des vecteurs dans un diagramme agissant sur un point représentant la masse. Attention : je les ai fait partir tout les deux du même point par soucis de clarté. Normalement, un seul vecteur part du point de départ, les autres s'ajoutent.
Le diagramme de forces est simplement une transposition des vecteurs dans un diagramme agissant sur un point représentant la masse. Attention : je les ai fait partir tout les deux du même point par soucis de clarté. Normalement, un seul vecteur part du point de départ, les autres s'ajoutent.

 Tout ça était une application simple des diagrammes de force avec deux vecteurs. Ajoutons une tension T à ce scénario.
Tout ça était une application simple des diagrammes de force avec deux vecteurs. Ajoutons une tension T à ce scénario.

 Supposons maintenant que nous enlevions la corde et le pieu, laissant glisser la masse. Quelle sera alors son accélération ?
Supposons maintenant que nous enlevions la corde et le pieu, laissant glisser la masse. Quelle sera alors son accélération ?

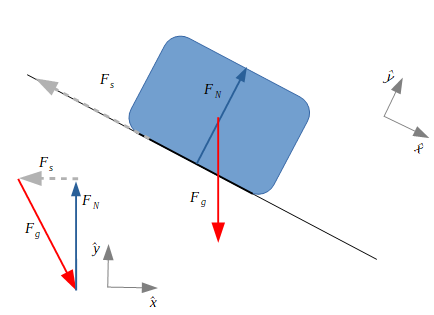 Il s'agit de la friction qui empêche une masse de glisser - qui retient la masse. Comme la force qui lui correspond dépend de la force avec laquelle la masse pousse sur la surface, la force de friction statique dépend de la force normale.
Il s'agit de la friction qui empêche une masse de glisser - qui retient la masse. Comme la force qui lui correspond dépend de la force avec laquelle la masse pousse sur la surface, la force de friction statique dépend de la force normale.
 La friction de roulement est encore un peu plus empirique que les autres. C'est plus un modèle qu'une vraie quantité. En effet, si une partie de cette friction est due à l'interaction entre deux surface (un pneu et de l'asphalte fondu qui colle), une autre, non négligeable, est simplement due à la forme de la roue ou à la rigidité de la surface.
La friction de roulement est encore un peu plus empirique que les autres. C'est plus un modèle qu'une vraie quantité. En effet, si une partie de cette friction est due à l'interaction entre deux surface (un pneu et de l'asphalte fondu qui colle), une autre, non négligeable, est simplement due à la forme de la roue ou à la rigidité de la surface.